




羽ばたき型飛翔ロボットの研究
この研究では、羽ばたき運動により飛行する飛翔ロボットの研究開発を行っています。 ホバリングや急旋回ができるトンボ型ロボットや、長時間滞空できるトンビ型ロボットの開発を目指して、 小型で軽量な羽ばたき駆動機構の開発や、最適に変形する羽ばたき翼の設計を行っています。

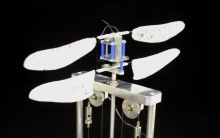
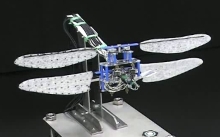
共振型トンボロボット
|
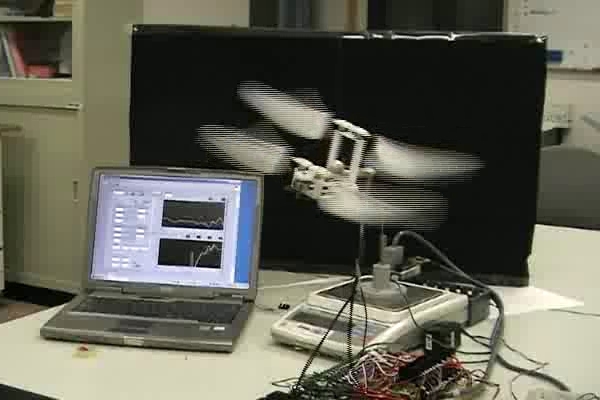
トンボロボットのホバリング実証実験
|

共振型羽ばたき翼の推力測定試験
|

トンビ型ロボット
|
日本機械学会流体工学部門ニューズレター「流れ」4月号 の特集記事に掲載されいますのでご覧下さい。
共振型羽ばたきロボットの姿勢制御実験
共振型羽ばたきロボットでの姿勢制御の実証を行うために、 ロボットの重心を回転が自由な状態で支持し、姿勢制御実験を行いました。 自動制御を行うことで、ロボットの姿勢を安定に保つことができました。
トンボ型ロボット制御実験装置
|
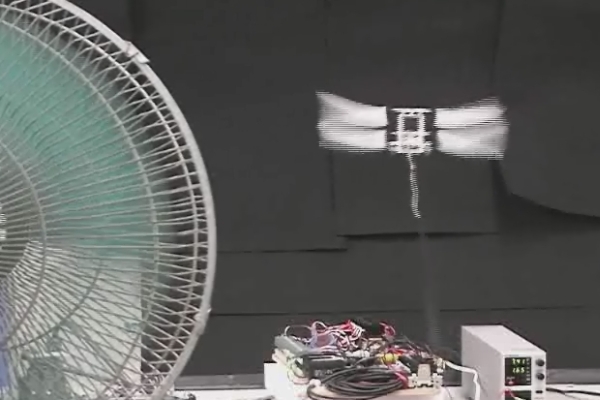
共振型羽ばたきロボットの吊り試験
姿勢センサを搭載した共振型羽ばたきロボットを糸で吊るし、姿勢制御実験を行いました。 そのロボットに扇風機を使って突風を当てた場合も、ロボットはバランスを保っています。
|
|
共振型羽ばたきロボットを糸で吊るし、ラジコンによる操作実験を行いました。 羽ばたきによって機体が少し浮いており、機体を越える推力の発生に成功しました。

|
低レイノルズ数における空力特性の研究
この研究では、回流式可視化水槽ならびにPIV(粒子画像流速計測法)やCFD(数値流体解析)を使って 昆虫が飛翔しているときの翅がもたらす空力特性を在来翼型と比較しながら研究し、 低レイノルズ数で特性の良い翼型の設計や最適な羽ばたき運動を設計することを目指しています。
|

|
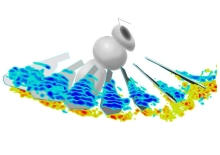
| マルハナバチの羽ばたき翼まわりの渦の様子 (PIV計測) | 低レイノルズ数流れの可視化 |
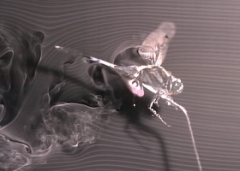
スモークワイヤー法による昆虫の流れの可視化動画
昆虫の翼まわりに渦が発生していることが分かります。この渦が昆虫に働く揚力を高めています。

|
|
| アシナガバチの流れの可視化 (MPG形式-2.5MB) | シオカラトンボの流れの可視化 (MPG形式-3.3MB) |
非羽ばたき型飛翔ロボットの研究
この研究では、実際のトンボの凹凸の断面形状を参考にして 低レイノルズ数でも揚抗特性と飛行特性に優れるコルゲート翼型を開発し、 それを用いて非羽ばたき方式の昆虫型超小型飛翔ロボットの開発を行っています。

非羽ばたき型ロボット試作機
|

試作機飛行写真
|
トンボの動特性・飛行制御の研究
この研究では、実際のトンボの羽ばたきフリーフライトを高速度カメラを用いて撮影し、 その3次元運動解析を行うことで、飛行制御のためにトンボがどのように翅を動かしているかを研究しています。 実際のトンボは航空機では実現できないような複雑な飛行運動を行っており、その翅の動かし方をロボットにも活かしていきます。
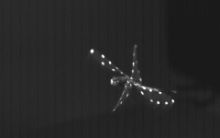
トンボのフリーフライト画像
|
トンボの飛行解析画像
|
トンボは体に比べて翼が大きいため、数回の羽ばたきで姿勢を変化させることができます。
トンボは、離陸時には前後の翼を同時に打ち下ろし大きな揚力を得ています。 前進飛行へと移るに従い、後翼が前翼に対して先行する動きになっています

マルハナバチは翼に比べて体が大きいため、1回の羽ばたきの間にそれほど姿勢が変化しません。
